

Types of Differential and How They Work

Like most things on modern automobiles, the simple piece of gearing known as a differential has seen constant refinement and experimentation - leading to a range of types each with their own advantages and disadvantages.
The concept of the differential – that is, to allow wheels mounted on the same axle to rotate independently of each other – is an ancient design, with the first known instance of its use recorded in China during the 1st millennium BC.
Although this was long before the invention of the automobile, carts, wagons and chariots still suffered from the same problem of one wheel slipping or dragging when cornering, increasing wear and damaging roads.
The advent of engines powering front or rear wheels to propel a vehicle instead of merely dragging them via horse added a new problem to overcome – how to allow independent rotation while still being able to power both wheels.
The earliest automobiles didn’t bother trying, they simply powered only one wheel on an independant axle. But this was far from ideal as it meant they were underpowered and encountered frequent problems with traction on anything other than firm, level ground.
Eventually this led to the development of the Open Differential before other more complicated types were developed to overcome more complex driving conditions.
Watch this video which explains with 3D imagery how the following types of differential work:
Open Differential:
A differential in its most basic form comprises two halves of an axle with a gear on each end, connected together by a third gear making up three sides of a square. This is usually supplemented by a fourth gear for added strength, completing the square.
This basic unit is then further augmented by a ring gear being added to the differential case that holds the basic core gears – and this ring gear allows the wheels to be powered by connecting to the drive shaft via a pinion.
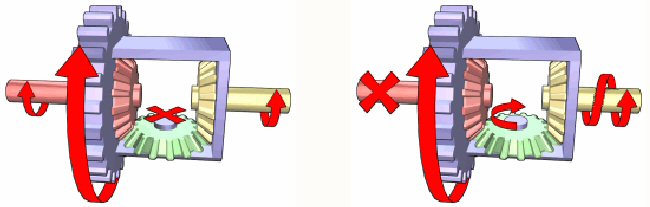
In this example you can see the three sides of the internal gearing that make up the core mechanism, with the larger blue gear representing the ring gear that would connect to the drive shaft. The left image shows the differential with both wheels turning at the same speed, while the right image illustrates how the inner gears engage when one wheel turns slower than the other.
This gearing arrangement makes up the open type differential, and is the most common type of automotive differential from which more complicated systems are derived.
The benefit of this type is mostly limited to the basic function of any differential as previously described, focusing primarily on enabling the axle to corner more effectively by allowing the wheel on the outside of the turn to move at a faster speed than the inside wheel as it covers more ground. It does also benefit from its basic design being relatively cheap to produce.
The disadvantage of this type is that because the torque is split evenly between both wheels, the amount of power able to be transmitted through the wheels is limited by the wheel with the lowest amount of grip.
Once the traction limit of both wheels combined is reached, the wheel with the lowest amount of traction will begin to spin – reducing that limit even further as there is even less resistance from the already spinning wheel.
Read Our Blog on Turbos, Superchargers and Naturally Aspirated Engines
Locked Differential:
The locked or locking differential is a variant found on some vehicles, primarily those that go off road. It is essentially an open differential with the ability to be locked in place to create a fixed axle instead of an independent one. This can happen manually or electronically depending on technology in the vehicle.
The benefit of a locked differential is it is able to gain a considerably greater amount of traction than an open differential. Because the torque is not equally split 50/50 it can channel more torque to the wheel that has the better traction - and is not limited by the lower traction of the other wheel at any given moment.
Because you are unlikely to be travelling at speed and are usually travelling over uneven ground, the issue of tyre drag and wear around corners on a fixed axle is less of a problem.
One disadvantage of locked diffs is called binding, which occurs when excess rotational energy (torque) is built up within the drive train and needs releasing – typically achieved by the wheels leaving the ground to reset the position. Or by simply releasing the locks once they are no longer needed.
Imagine a long cardboard tube held at each end, and then twisting the tube in opposite directions to the point the tube couldn’t withstand the force anymore and folds and tears – that’s binding. It happens because the wheels are moving at different speeds which twists the axles and puts increased pressure on the gears - but the load on the wheels and their increased traction is enough to prevent the tyres slipping to release the pressure.
Welded/Spool Differential:
Welded differentials are essentially the same as a locked differential, only it has been permanently welded from an open differential into a fixed axle (also known as a spool diff.) This is usually only done in specific circumstances where the characteristics of the locked diff/fixed axle, which makes it easier to keep both wheels spinning simultaneously, are desirable – for example, in cars meant for drifting.
It's typically not recomended as the heat from welding can compromise component strength and increase the risk of catastrophic part failure - potentially even resulting in the broken differential gears exploding through the diff casing and posing a hazard to other road users and pedestrians.
Limited Slip Differential:
LSD’s work to combine the benefits of Open and Locked differentials through a more complicated system. There are two categories which use different forms of resistance to achieve the same effect:
Mechanical Clutch LSD:
This type of LSD surrounds the same core gearing seen in the open diff with a pair of pressure rings, which exert force on two sets of clutch plates positioned alongside the gears. This provides resistance to the independent rotation of the wheels changing the effect of the differential from open to locked – and providing it with the increased traction this type benefits from over an open differential.
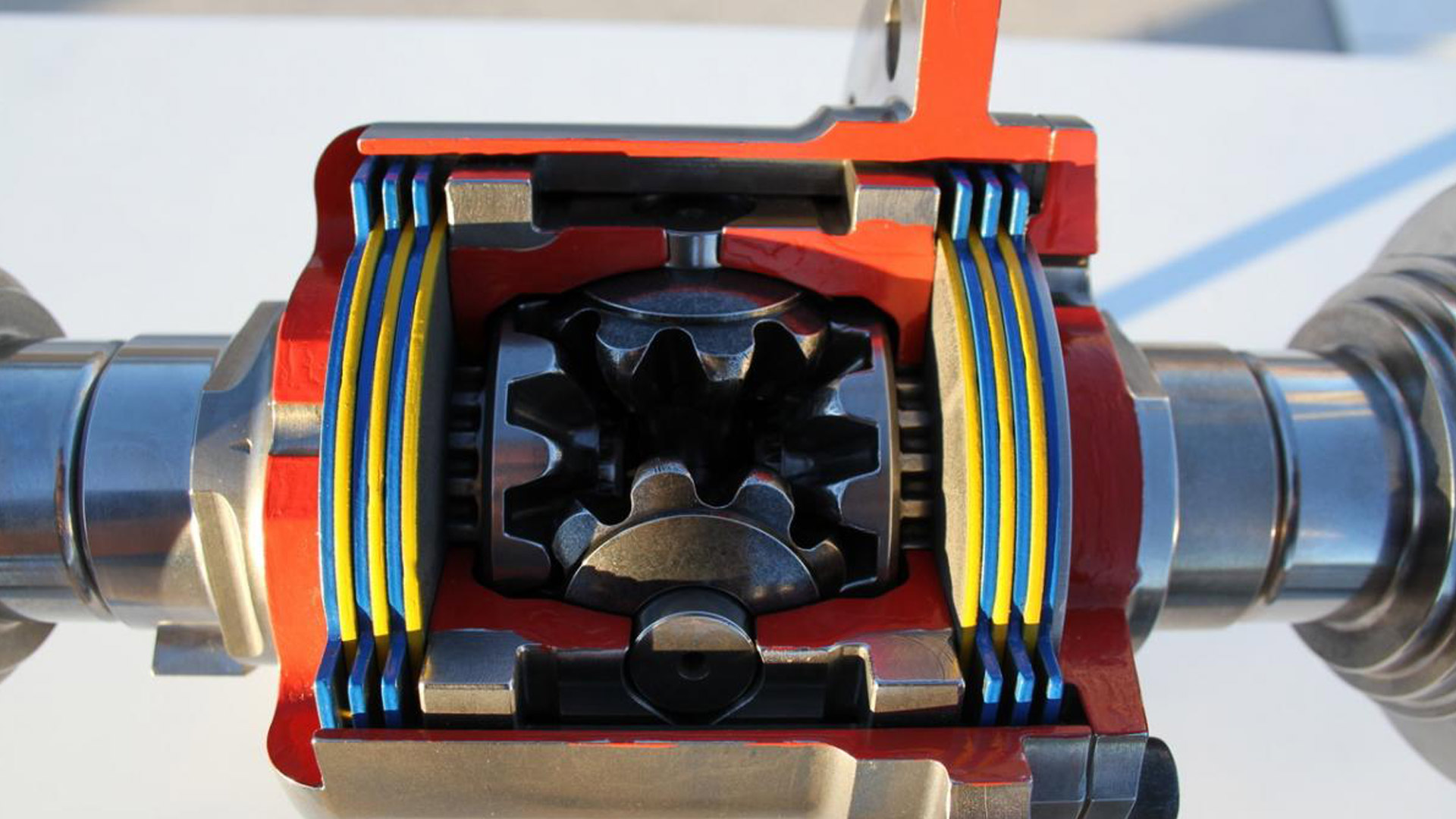
In this cutaway, you can see the the pressure rings (also cut away) surrounding the core gears, which are forced apart by the central gear pins pushing against the angled surfaces under rotation. This movement pushes the pressure rings onto the clutch packs (yellow and blue) on either side, generating resistance and changing the behaviour of the axle from an open to a fixed type of effect.
Mechanical Clutch LSD’s are also further split into subtypes which behave in slightly different ways and alter when the pressure on the clutch plates and pressure rings is exerted:
- In a one-way LSD, the pressure is only exerted under acceleration. This means that when cornering and off the power the diff behaves as an open type, allowing them to turn independently – but under acceleration the forced rotation of the differential creates friction in the clutch plates, locking them in place in order to gain more traction.
- A Two way LSD takes it a step further and exerts pressure on the clutch plates under deceleration too, in an effort to improve stability under braking on variable road surfaces.
- The one and half way again tries to combine the best of both subtypes, by exerting a greater amount of pressure under acceleration and lesser amount under deceleration.
The downside to mechanical LSDs is they require regular maintenance to keep operational and are prone to wearing out completely, making for an expensive part replacement.
Viscous LSD:
The second type of limited slip differential, they instead use a thick liquid in place of clutches to create the resistance needed to alter the differentials behaviour between open and locked. Due to having less moving parts than a mechanical LSD, VLSD’s are simpler but also have a wider range of advantages and disadvantages in comparison.
In their basic operation the effect is smoother in application than mechanical LSDs, as the resistance builds in unison with the speed the wheels are travelling at in comparison to the differential case - providing a very gradual increase.
VLSDs are also able to direct torque more effectively to the wheel that has more traction. Because the fluid acts to be resistant under speed, if a wheel ever loses traction and spins the difference in speed between the two wheels inside the differential creates more resistance on the slower moving wheel - channelling more torque from the drive shaft to it.
VLSDs do become less effective with prolonged use, as the fluid heats it becomes less viscose and provides less resistance. It also cannot lock as fully as a mechanical LSD due to a fluid being unable to provide absolute resistance within an adequate space.
A disadvantage with both mechanical and viscous LSDs is that the system does not always channel torque effectively during high speed cornering, as it can interpret the faster moving outer wheel as losing traction. It then directs torque to inner wheel, generating over/understeer at the opposite moment to when it’s needed.
Torsen Differential:
The Torsen (Torque – Sensing) differential employs the use of some clever gearing to produce the same effect as a limited Slip Differential without the need for clutches or fluid resistance.
It achieves this by adding a layer of worm gearing to the traditional gear set up of an open differential. These sets of worm gears acting on each axle provide the resistance required to enable torque transfer, which it then achieves by having the worm gears in constant mesh with each other via connected spur gears.
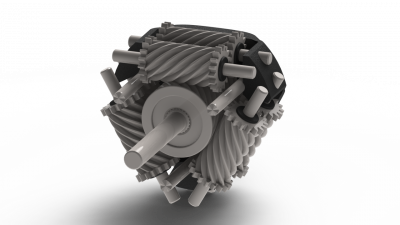
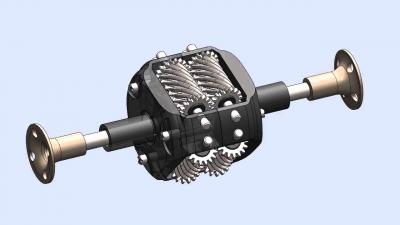
 The first and second images show the three pairs of worm gears meshed with each half of the axle - with the spur gears at the end of each worm connecting the pairs. It's this connection that transfers torque from one wheel to the other, once one axle begins rotating faster than the other. While the first and second images are of the orginal torsen design, the third image is of the second version of the torsen differential. The newer design repositioned the worms gears to be inline with axles but still perform the same mechanical action. Each worm gear is still in contact with its pair, and only one side of the axle with spaces in the gear removing the mesh with the other side.
The first and second images show the three pairs of worm gears meshed with each half of the axle - with the spur gears at the end of each worm connecting the pairs. It's this connection that transfers torque from one wheel to the other, once one axle begins rotating faster than the other. While the first and second images are of the orginal torsen design, the third image is of the second version of the torsen differential. The newer design repositioned the worms gears to be inline with axles but still perform the same mechanical action. Each worm gear is still in contact with its pair, and only one side of the axle with spaces in the gear removing the mesh with the other side.
The constant mesh between the two sides of the differential has the added benefit of transferring the torque immediately, making it extremely responsive to changing road and driving conditions.
Whereas an open differential always has to split it’s torque split 50/50 between each wheel, the Torsen differential is capable of directing a greater percentage of torque through one wheel depending on the ratios of the gears. This removes the power limitation that open differentials suffer because the amount of torque available is not being limited by the amount traction in either wheel.
Furthermore, the gearing can also be machined in such a way as to impart a different ratio of resistance when accelerating and decelerating in the same way a one and half way limited slip differential does.
This all achieved mechanically without the use of electronics or any form of perishable part being sacrificed for friction, and overall the Torsen differential is the superior mechanical system that combines the primary benefits of all the previous differential types listed.
Read Our Blog on Dual Clutch Transmissions and How They Work
Active Differential:
Very similar to a limited slip differential, the active differential still employs mechanisms to provide the resistance needed to transfer torque from one side to another - but rather than relying on purely mechanical force, these clutches can be electronically activated.
The active differential can use electronics to artificially alter the mechanical forces the system is experiencing through changing driving conditions. This makes them controllable and thus programmable, and by employing a range of sensors across the vehicle a computer can automatically detect which drive wheels to direct power to and when.
This drastically improves performance, especially over imperfect road surfaces, and is particularly favoured by rally drivers whose cars endure rapidly changing driving conditions and need a system that can keep up with their continuous adjustments to the vehicle.
Torque Vectoring Differential:
The TVD takes this electronically enhanced system even further by using it to manipulate the angle, or vector, of the vehicle in and out of the turns by encouraging specific wheels to receive more torque at key moments - improving cornering performance.
By activating the opposite clutch to what a purely mechanically driven LSD would normally engage, you can use the effect to assist with steering while also putting more power down, overcoming the deficiencies in the LSD system.
On entry to the corner, a multi-way LSD exerts resistance to both wheels to at least partially lock the axle and stabilise it under braking - which is then released as the wheel speed drops and the vehicle turns in, allowing the wheels to rotate at different speeds .
However, instead of releasing the resistance on both wheels a TVD continues to activate the clutch on the outside wheel only - increasing the resistance experienced by that wheel and making the system channel more torque through it. This imbalance of power to the outside encourages the vehicle to turn into the corner sharper and reducing understeer.
By continuing to apply this resistance through the corner, as the vehicle passes the apex and begins to accelerate out it will continue to override a normal multiway-LSD - which would again interpret the faster moving outside wheel as slipping and divert torque during acceleration to the inside wheel, which it perceives as having more grip.
With the TVD exerting more resistance onto the outside wheels clutch, it tricks the system into diverting more torque through it - increasing the amount power that can be applied and reducing the understeer experienced under acceleration out of a corner.
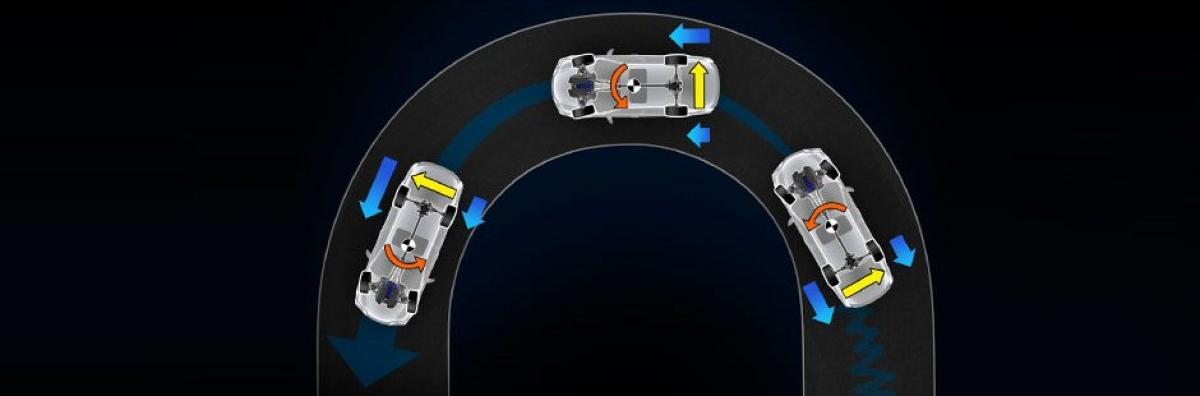 The yellow arrow highlights the torque transfer occuring through the corner, generated by the artifical resistance being exerted by the TVD on the outside wheel. This allows for greater acceleration out of the corner while the car's turning abilitty is increased.
The yellow arrow highlights the torque transfer occuring through the corner, generated by the artifical resistance being exerted by the TVD on the outside wheel. This allows for greater acceleration out of the corner while the car's turning abilitty is increased.
A Torque Vectoring Differential is capable of channelling 100% of the available torque through a single wheel when needed in the most extreme of circumstances.
The downside to the system is it is very complicated and very expensive, and typically only used for racing/track applications for its high speed cornering potential.
Every system has it owns benefits and disadvantages, and although the more complicated systems are generally superior they have an attached cost that far exceeds the simpler systems.
As with everything automotive, how much benefit you will gain from each system comes to down to what exactly you will be doing with your vehicle and what you need your differential to be capable of. You’re not going to have much need for a Torque Vectoring Differential when visiting the local supermarket, unless you fancy yourself in the next WRC and can afford the fines - but you may want a Locking Differential if you happen to live in a rural location better accessed by an off-road vehicle.
Click here for a visual breakdon of the different types of differential.
MAT FOUNDRY GROUP ARE A LEADING MANUFACTURER OF GREY AND DUCTILE IRON CAR COMPONENTS. TO LEARN MORE ABOUT US VIEW OUR PRODUCTS OR CONTACT US TODAY
Have you read these related articles?



LEM2024ISMA
Wir sind der führende Hersteller von PKW-Bremsscheiben für den Ersatzteilmarkt.
Unser Unternehmen ist mit ca. 60 Mitarbeitern in Lemgo ansässig.
Als Mitglied der MAT Foundry Group gehören wir zu einem Verbund aus acht Unternehmen und ca. 2.000 Mitarbeitern auf drei Kontinenten.
Die Gießereien der MAT Foundry Group produzieren jährlich mehr als 350.000 Tonnen Stahl.
In den Bearbeitungsstandorten werden Produkte für Pkw, Nutzfahrzeuge sowie Schwerlastfahrzeuge, Industrie- und Rennsportanwendungen bearbeitet.
Ihr Aufgabenbereich:
- Wartung und Instandhaltung der Produktionsanlagen sowie gebäude-technischen Anlagen
- Eigenständige Durchführung von Reparaturen sowie die Sicherstellung der Betriebsbereitschaft der Produktionsanlagen
- Überwachung und Prüfung von Betriebsanlagen im Rahmen der gesetzlichen Anforderungen
- Realisierung technischer Modifikationen und Optimierung der vorhandenen Produktionsanlagen
- Dokumentation der durchgeführten Arbeiten mittels EDV
Ihr Profil:
- Abgeschlossene Ausbildung als Mechatroniker*in (m/w/d)
- Erfahrung im Bereich der Instandhaltung von technischen Anlagen sind von Vorteil
- Grundkenntnisse in den Bereichen Hydraulik, Pneumatik und Steuerungstechnik
- Kenntnisse im Umgang mit technischen Dokumentationen und verfahrenstechnischen Systemen
- Idealerweise Staplerschein und Schweißfertigkeiten
- PC-Kenntnisse in MS-Office
- Selbstständige und strukturierte Arbeitsweise
- Umweltbewusstes und sicherheitsrelevantes Handeln
- Gute Deutschkenntnisse in Wort und Schrift
- Teamfähigkeit, Zuverlässigkeit und Belastbarkeit
Wir bieten Ihnen:
- Eine Vollzeitbeschäftigung (35-Stunden Woche) mit Vergütung nach IG-Metall-Tarif inkl. Weihnachts-, Urlaubsgeld und 30 Tagen Urlaub
- Teil eines professionellen und kompetenten Teams zu sein
- Schnelle Entscheidungswege
- Modernste Arbeitsmittel
- Eine Tätigkeit mit Eigenverantwortung
- Kontinuierliche Weiterbildungsmöglichkeiten
- JobRad-Möglichkeit mit kostenlosem Ladeangebot am Standort
- Zuschuss zu Getränken am Arbeitsplatz
Haben wir Ihr Interesse geweckt?
Dann senden Sie Ihre Bewerbungsunterlagen am besten per E-Mail an:
Markus Brand -
Eurac Lemgo GmbH
Weststraße 1-5
32657 Lemgo-Lieme